Potencjał komercjalizacyjny wyników projektu
Możliwości komercjalizacji mają opracowane w ramach projektu: robot do wspomagania operacji iniekcji zawiesiny komórek macierzystych do zwieracza cewki moczowej u kobiet w leczeniu wysiłkowego nietrzymania moczu oraz narzędzie chirurgiczne przeznaczone do tego samego celu.
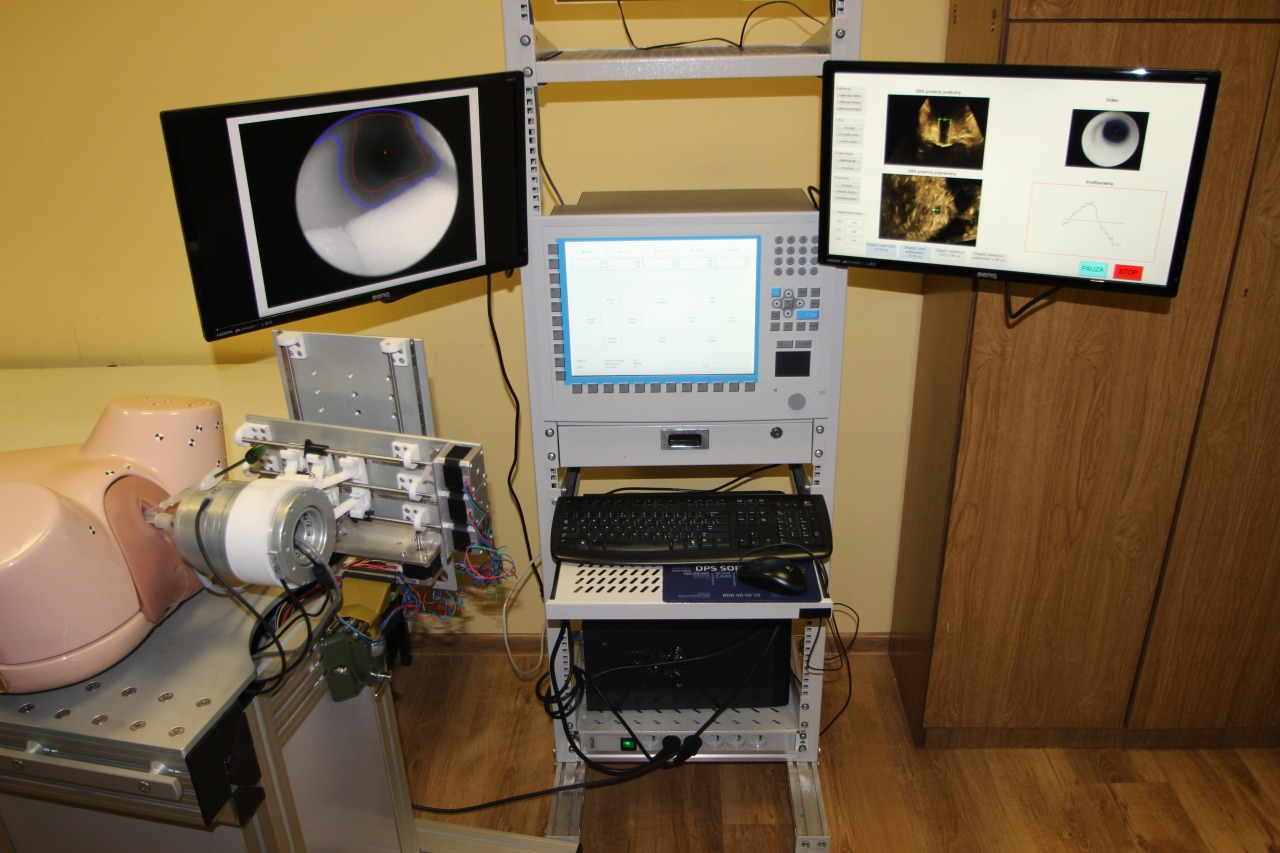
Szacuje się, że ponad połowa kobiet po 60 roku życia oraz 60-70 procent kobiet po porodzie ma problem z wysiłkowym nietrzymaniem moczu. Jedną z metod leczenia jest precyzyjne podanie komórek macierzystych w mięsień zwieracza. Zlokalizowanie miejsca podania oraz trafienie w nie jest bardzo trudne przy prowadzeniu operacji w sposób tradycyjny. A w przypadku tkanek mięśniowych, dla ich efektywnej regeneracji wymagana jest duża precyzja podania komórek macierzystych. Stąd też narodził się pomysł, aby proces ten przeprowadził robot, kontrolowany przez lekarza. Niestety obecnie nie ma na świecie robotów, które umożliwiłyby przeprowadzenie takiego zabiegu.
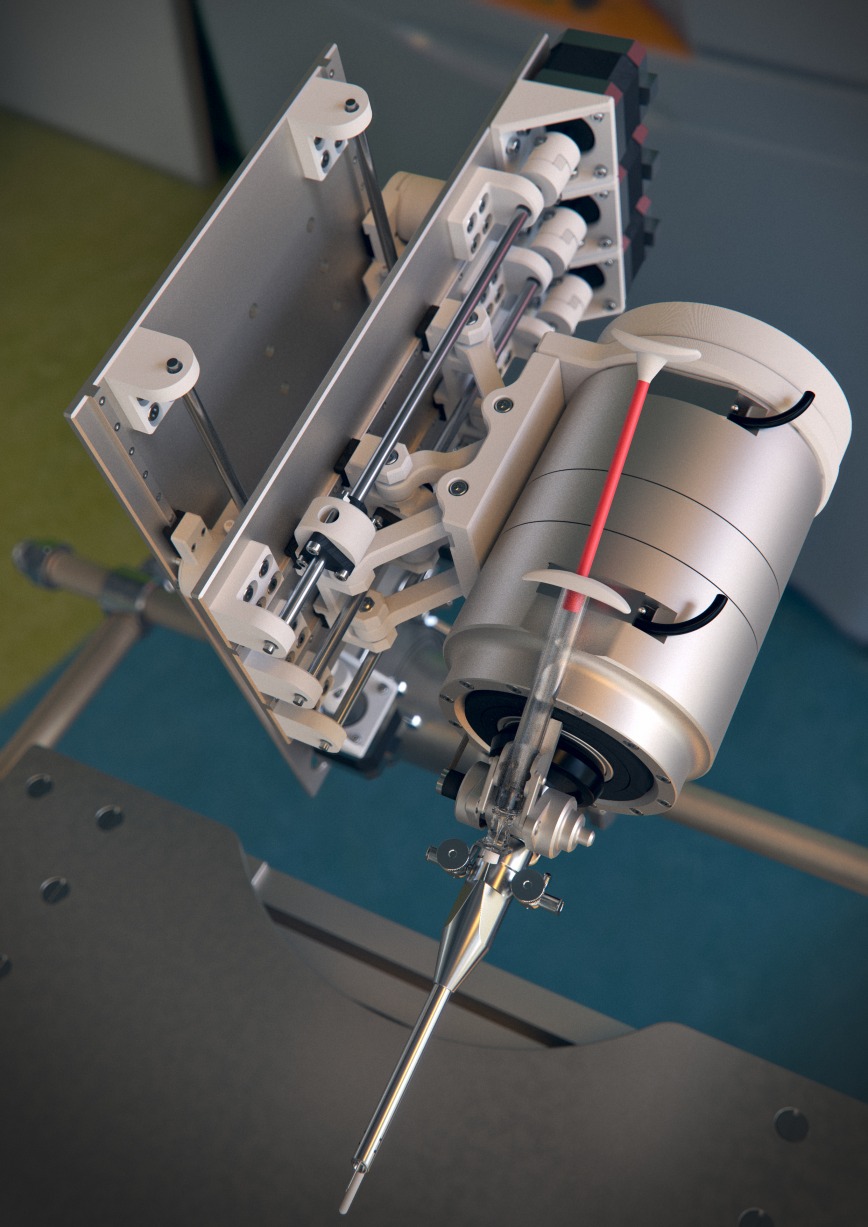
W opracowanym rozwiązaniu robot hybrydowy składa się z dwóch mechanizmów. Jest to pierwsza zaleta, która w znacznym stopniu podnosi walory pracy w obszarze miednicy mniejszej. Mechanizm „pionowy” jest mechanizmem płaskim, dzięki czemu bez problemu mieści się pomiędzy nogami pacjenta. Mechanizm ten jest mechanizmem równoległym, a co za tym idzie, daje dużą sztywność i precyzję przy niewielkiej masie układu. Dodatkowo człony liniowe (pryzmatyczne) ułożono na jednej prowadnicy. Uzyskuje się przez to łatwe wysunięcie końcówki robota z pacjenta w przypadku sytuacji awaryjnych. Mechanizm pionowy posiada trzy stopnie swobody, umożliwiając ruch końcówki w osi pionowej, osi od i do pacjenta oraz pochylenie końcówki. Szczególną zaletą jest duży ruch od i do pacjenta. W zaproponowanym rozwiązaniu zakres ten jest największy. Dlatego opracowana struktura robota hybrydowego może służyć do wszelkich zabiegów urologicznych, jak i ginekologicznych lub innych wykonywanych w obszarze miednicy mniejszej zarówno u kobiet, jak i u mężczyzn.
Mechanizm „poziomy” jest uzupełnieniem „pionowego”. Dodaje dwa stopnie swobody. Ruch poziomy i obrót. Ruchy te są przydatne w początkowej fazie zabiegu, kiedy to lekarz orientuje narzędzie względem pacjenta. Mechanizm ten posiada jeszcze jedną zaletę. Jego konfiguracja pozwala na łatwe przymocowanie robota do stołu operacyjnego.
Połączenie mechanizmu „pionowego” i „poziomego” umożliwia lekarzowi pełną swobodę pracy, przy niezwykle zwartej konstrukcji robota. Jest to kolejna zaleta opracowanego rozwiązania, gdyż podczas operacji przestrzeń dla robota jest bardzo mała. Przy stole operacyjnym znajduje się wiele innych urządzeń i uniknięcie kolizji umożliwia tylko dedykowana konstrukcja w postaci robota hybrydowego.