

Tadeusz Uhl, Katedra Robotyki i Mechatroniki, Akademia Górniczo – Hutnicza w Krakowie
- Wstęp
Ze względu na zmiany zachodzące w rynku firmy konkurujące globalnie muszą zmieniać swoją strategię tak aby móc skutecznie się rozwijać. Przede wszystkim muszą wdrażać bardzo szybko nowe produkty o coraz większej zawartości innowacji i spełniające rosnące wymagania klientów. Najczęściej nowe produkty mają charakter interdyscyplinarny oraz wymagają, w fazie projektowania umiejętności integracji elementów o różnej naturze fizycznej. W związku z rosnącą konkurencją, jednym z podstawowych zadań współczesnego inżyniera jest konieczność skrócenia czasu trwania projektu, spojrzenie na produkt w czasie projektowania z uwzględnieniem całego cyklu życia produktu i realiów rynku, a także uwzględnienie problematyki zarządzania i wytwarzania w czasie projektowania.
Stwarza to konieczność zatrudniania inżynierów o innych umiejętnościach niż klasyczne umiejętności inżynierskie. Powoduje to, ze współczesny rynek pracy stał się bardzo dynamiczny, mają na nim szanse tylko ci, którzy są elastyczni, mają szeroką interdyscyplinarną wiedzę, są kreatywni i efektywni w swoich działaniach. Wszyscy biorący udział w procesie kształcenia zastanawiają się jak osiągnąć model idealnego wykształcenia współczesnego inżyniera. Również w Katedrze Robotyki i Mechatroniki od kilkunastu lat wdrażany jest system kształcenia dostosowany do rosnących potrzeb zmieniającego się bardzo szybko rynku pracy. Na początku zidentyfikowano potrzeby pracodawców przeprowadzając ankietę. Jak wynika z uzyskanych rezultatów wybrano cztery umiejętności, które są najbardziej istotne; szeroka interdyscyplinarna wiedza, umiejętność pracy zespołowej w wielu przypadkach w zespołach międzynarodowych, umiejętność komunikowania się ze specjalistami różnych dziedzin, umiejętność posługiwania się nowoczesnymi narzędziami pracy inżyniera. Wymagania te były widoczne szczególnie w sektorze małych i średnich firm. Dodatkowo założono, że studia powinny wykształcić w absolwencie entuzjazm do wykonywanej pracy, wyrobić umiejętność efektywnego i skutecznego rozwiązywania problemów oraz nawyk myślenia o ekonomii zastosowanych rozwiązań na każdym kroku realizacji projektów.
Pierwszym krokiem we wdrażaniu nowego sposobu kształcenia była realizacja projektu na temat „ Międzynarodowy program studiów w zakresie mechatroniki jako odpowiedź na malejące zainteresowanie studiami inżynierskimi”. Projekt był wspierany przez fundusz FSS w ramach funduszu norweskiego. Cele tego projektu była implementacja nowych międzynarodowych programów zakresie mechatroniki na Akademii Górniczo – Hutniczej uwzględniających podejście rynkowe do rozwiązywania problemów inżynierskich (ang. Market based engineering). Wynikiem projektu są zupełnie nowe programy kształcenia, które uwzględniają szeroki zakres zadań samokształcenia w projektowaniu i budowaniu konstrukcji inżynierskich oraz współpracę, w zakresie kształcenia kadr, z przemysłem. Zaproponowane w programie kursy zawierają kursy podstawowe, kursy zaawansowane i kursy ekspercie. Kursy podstawowe realizowane są w oparciu o klocki LEGO i podejście prób i błędów. Jest to kurs dedykowany dla studentów na początku studiów lub nawet zainteresowanych uczniów szkół średnich. Kursy zaawansowane są realizowane, również w oparciu o klocki LEGO, jednak do zaprojektowania i budowy konstrukcji wykorzystywane są metody stosowane do projektowania rzeczywistych konstrukcji przemysłowych. Projekt realizuje się rozpoczynając od rysunków CAD, schematów sterowania wykonywanych za pomocą systemów wspomagania i symulacji układów sterowania a kończy na produkcji niektórych niedostępnych elementów za pomocą technologii generacyjnych takich jak drukowanie 3D lub implementacji sterowania w oparciu o wirtualne prototypowanie i automatyczne generowanie kodu języka C dedykowanego dla sterownika realizującego sterowanie. Kursy te są dedykowane dla studentów starszych lat, mających już podstawową wiedzę z zakresu projektowania, w szczególności projektowania mechatronicznego. Najwyższą formą przygotowanych kursów są kursy eksperckie. Ich idea polega na budowie produktów mechatronicznych od idei, aż do procesu wytwarzania. Kurs taki trwa około roku i zawiera wszystkie etapy projektowania produktów. Kursu przeznaczone są dla semestrów dyplomowych studentów oraz jako kursy podyplomowe.
We wszystkich zaproponowanych kursach podstawowym elementem są projekty. Projekty ocenia się pod kątem czasu ich realizacji, kompletności rozwiązania oraz kreatywności. Wszystkie projekty są realizowane jako prace zespołowe, na zakończenie przygotowana i oceniana jest prezentacja projektu.
- Kształcenie cross- dyscyplinarne
Większość problemów projektowych realizowanych w przemyśle to problemy interdyscyplinarne, prawie w każdej konstrukcji występują elementy mechaniczne, elektroniczne jest również sterowanie oraz oprogramowanie. Tak więc zaprojektowanie nowoczesnego produktu wymaga umiejętnego poruszania się po wszystkich tych dziedzinach jednocześnie. Wymaga to od projektanta szerokiej interdyscyplinarej wiedzy, a przede wszystkim myślenia o produkcie jako o całości, a nie sumie poszczególnych części. Aby uzyskać poziom wiedzy projektanta taki aby swobodnie mógł formułować i rozwiązywać problemy projektowe w wielu dziedzinach techniki jednocześnie, w ostatnim okresie wdrożono kształcenie cross dyscyplinarne w ramach którego, w poszczególnych przedmiotach integruje się zagadnienia interdyscyplinarne, co oznacza, że w jednym przedmiocie występują zagadnienia z kilku dyscyplin.
We większości przedmiotów studentom zlecane są kompletne projekty oraz wymagane jest ich kreatywne i efektywne rozwiązanie. Ocenie podlega efekt realizacji projektu, a nie sposób jego realizacji. Trudność projektów jest stopniowana od zadań prostych do zadań bardzo złożonych wymagających wysokich umiejętności inżynierskich. Bardzo często wyniki projektów podlegają ocenie zewnętrznej poprzez udział w konkursach i zawodach. W ten sposób wykształca się w studentach nawyk konsekwentnej realizacji zleconych zadań, odpowiedzialności za ich realizację oraz nawyk poszukiwania najkrótszej i najszybszej drogi do osiągnięcia rozwiązania. Nawyki te mogą być w życiu zawodowym drogą do sukcesu.
Udział studentów w wykładach ma pozwolić im na dyskusję realizowanych tematów i uzyskanie praktycznej wiedzy dotyczącej formułowania i rozwiązywania problemów projektowych. Nie mogą to być, w szczególności na starszych latach studiów wykłady polegające na podawaniu definicji i pojęć, to musi być dyskusja i obie strony powinny być do niej przygotowane.
W procesie kształcenia istotna jest również współpraca z firmami, w których to studenci powinni brać udział w realizacji projektów.
- Realizacja kształcenia przez projekty
W Katedrze Roboty i Mechatroniki Wydziału Inżynierii Mechanicznej i Robotyki przyjęto strategie kształcenia przez projekty. Zorganizowano cztery zespoły projektowe, które realizują cztery niezależne projekty;
- GRAMM AGH, zespół realizujący projekt robota mobilnego na zawody ASME Design
- AERO AGH, zespół realizujący model samolotu na zawody SAE Aero Design
- Zespól AGH Racing Team, realizujący bolid formuly student
- Zespół AGH Space Systems, realizujący małego satelitę na zawody Cansat Competition 2015.
Każde z zawodów ma ściśle określony regulamin i do niego musi być dopasowana konstrukcja. Każde odstępstwo od regulaminu to punktu ujemne obniżające pozycje zespołu. Studenci z Katedry Robotyki i Mechatroniki odnieśli we wszystkich zawodach duży sukces. Wszystkie konstrukcje były bardzo zaawansowane technologicznie i w tym zakresie w większości przypadków polskie konstrukcje pokonały konkurencję i to znacznie.
3.1. Projekt hipermobilnego robota na zawody ASME Design
Amerykańska organizacja zrzeszająca inżynierów mechaników (ASME) jest corocznie organizatorem zawodów, w których biorą udział studenci z całego świata. Co roku zadanie konkursowe jest inne. Finał konkursu ma miejsce na prestiżowej konferencji IMECE (ASME 2015 International Mechanical Engineering Congress ) w Stanach Zjednoczonych. W tym roku, zawody odbywały się pod hasłem „Robots for Relief”. Zadaniem zespołów uczestniczących było zaprojektowanie i zbudowanie robota, który będzie w stanie przetransportować żywność przez trudny teren oraz dostarczyć ją w strefę zrzutu. Regulamin zawodów przewidywał wykonanie robota o następujących parametrach; wymiary nieprzekraczające 300mm x 250mm x 250 mm, robot musi być szczelny, musi się przebyć drogę od startu na ostatni stopniu toru przeszkód, gdzie znajduje się strefa zrzutu, musi być zasilany bateryjnie, czas przejazdu przez tor wynosi maksimum 300s.
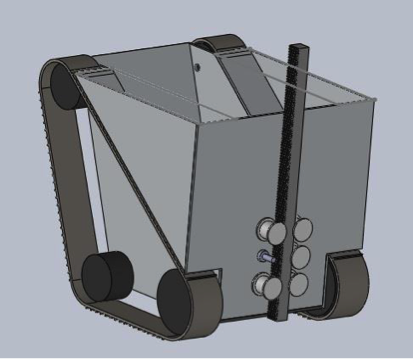
Rysunek 1. Projekt robota hipermobilnego do przewozu ładunku

Rysunek 2. Robot biorący udział w zawodach
Konkurs odbył się w dniu 18.04.2015 w Filadelfii w Stanach Zjednoczonych podczas konferencji „Student Professional Development Conference” organizowanej przez American Society of Mechanical Engineers (ASME). Konferencja trwała 2 dni, 17-18.04.2015. Podczas jej trwania uczestnicy poznali różne zespoły z amerykańskich uniwersytetów z całych Stanów Zjednoczonych, dzięki czemu mogli się wymienić doświadczeniami z zakresu projektowania i budowy robota, oraz co równie istotne porozmawiać na temat różnych koncepcji oraz strategii budowy robotów mobilnych. W zawodach wystartowały 23 zespoły, z czego 22 pochodziły z uniwersytetów amerykańskich, a nasz zespół był jedynym przedstawicielem z Europy. Do startu zostało dopuszczonych 18 zespołów, które przeszły inspekcję techniczną. W kategorii Student Design zespół z Katedry Robotyki i Mechatroniki GRAMM AGH w składzie (rys.2); Michał Gancorz, Rafał Krawczyk, Andrzej Kabała, zajął drugie miejsce, co daje awans do finałów konkursu, które odbędą się w Houston w listopadzie 2015 roku, na prestiżowym Kongresie IMECE. Tabela z wynikami jest dostępna pod adresem: http://www.templespdc.com/competition-results/. Po kilku modyfikacjach konstrukcja robota ma szanse zdobyć wysokie miejsce pomimo konkurencji z najlepszych Uniwersytetów amerykańskich. Jako założenie projektowe przyjęto, że robot będzie przewoził jak największą ilości ładunku przy jak najmniejszej baterii, kosztem czasu. Zrealizowano to poprzez dobór dużego zbiornika, przy maksymalnym wykorzystaniu ograniczeń wymiarów. W fazie opracowywania koncepcji robota, powstało kilka jego wariantów, na rysunku 1 przedstawiono finalną koncepcję robota. W kolejnej fazie zaplanowano harmonogram projektu oraz rozdzielono zadania na poszczególnych członków zespołu. Po wielu dyskusjach w styczniu przystąpiono do budowy finalnej wersji robota. Po serii testów robota zbudowano jego ostateczną wersję. Gotowa wersja robota została przedstawiona na zdjęciach rysunek 3. Robot posiadał największy zbiornik oraz zastosowano najmniejszą baterię spośród wszystkich zespołów. W czasie realizacji projektu studenci samodzielnie poszukali firm, które wykonały im poszczególne elementy konstrukcji, zrobili akcję marketingową oraz poszukali sponsorów w firmach. Część funduszy uzyskali z grantu Rektora AGH.
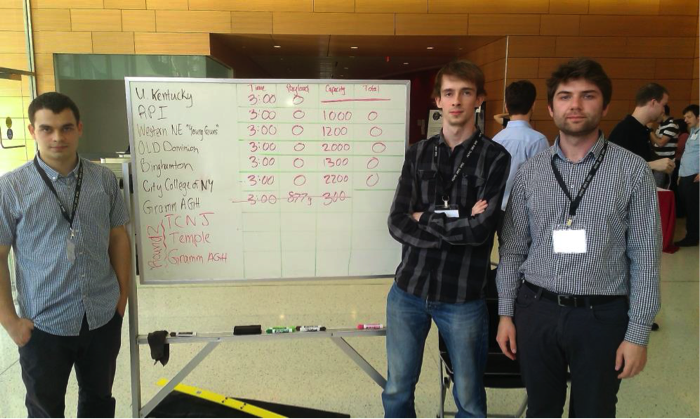
Rys. 3 Zespół biorący udział w zawodach w Filadelfi
3.2 Projekt bezzałogowego samolotu na zawody SAE AERO DESIGN
Zespół AERO TEAM ILK AGH to grupa studentów Akademii Górniczo-Hutniczej im. Stanisława Staszica w Krakowie, która przy współpracy z Instytutem Konstrukcji Lekkich Uniwersytetu Technicznego w Dreźnie, zaprojektowała i zbudowała model półautonomicznego modelu samolotu na zawody SAE Aerodesign West.
Członkowie zespołu to studenci kierunków Mechatroniki i Automatyki na Wydziale Inżynierii Mechanicznej i Robotyki. W skład zespołu wchodzi sześciu studentów (rys. 4) : Tomasz Frąk, Piotr Górny, Adrian Stępień, Patryk Straś, Artur Szwed oraz Piotr Wiśniowski, który jest doktorantem. Opiekunami naukowymi studentów byli prof. dr hab. inż. Tadeusz Uhl (AGH) oraz dr inż. Andrzej Czulak (TUD).

Rys. 4. Zespół AERO TEAM ILK AGH
SAE Aerodesign to seria prestiżowych zawodów kierowanych do przyszłych inżynierów branży lotniczej organizowanych od 1986 roku przy współpracy z firmami Lockheed Martin, Boeing oraz Agencją Kosmiczną NASA.
Zadaniem uczestników było zaprojektowanie i zbudowanie samolotu, który będzie w stanie optymalnie realizować zaplanowana misję i jednocześnie spełniac wszystkie warunki regulaminu. W trakcie zawodów oceniane są raport techniczny, prezentacja ustna oraz loty realizujące zadaną misję. Reprezentanci AGH wzięli udział w zachodniej edycji zawodów, która odbyła się w dniach 24-26 kwietnia 2015 roku w Van Nuys na przedmieściach Los Angeles (California, USA). Zdecydowali się oni zadebiutować w klasie Advanced czyli najbardziej wymagającej spośród trzech klas możliwych do wyboru (dwie pozostałe to Micro oraz Regular). W tej klasie misja składała się z następujących faz: startu, lotu stacjonarnego, zrzutu ładunku do celu oraz lądowania. W zawodach wzięło udział 71 drużyn z całego świata.
Samolot klasy Advanced aby zdobyć maksymalną liczbę punktów podczas lotów powinien udźwignąć ponad 6.8 kg ładunku statycznego oraz 1.5 kg ładunku dynamicznego (zrzucanej masy) przy masie modelu mniejszej niż 3.6 kg. Podczas lotów oceniana jest celność zrzutu ładunku dynamicznego do punktu, który znajduje się na ziemi. Jedynym ograniczeniem odnośnie konstrukcji samolotu jest napęd, musi to być silnik spalinowy o pojemności nie większej niż 7.5 cm3.
Studenci z AGH AeroTeam, to doświadczeni modelarze, którzy mogą pochwalić się licznymi osiągnięciami na arenie krajowej i międzynarodowej. Studenci potwierdzili swoje wieloletnie doświadczenie przedstawiając bardzo przemyślany i zdaniem wielu jurorów najbardziej zaawansowany technologicznie projekt w historii zawodów. Zaprojektowali oni bezzałogowy samolot „Minera”, który jest półautonomiczną jednostką latającą wykonaną w całości z materiałów kompozytowych opartych na włóknie węglowym o rozpiętości skrzydeł 3.8m i długości 2 m (rys.5).

Rys.5 Samolot bezzałogowy Minera
„Miner” został wykonany przy użyciu form negatywowych w znacznej większości z włókna węglowego, naśladując w ten sposób konstrukcje najbardziej zaawansowanych jednostek latających na świecie. Skrzydła modelu wykorzystują przekładkę typu sandwich, a w belce ogonowej modelu zrealizowano strukturę plastra miodu, która zapewnia odpowiednią sztywność przy ekstremalnie niskiej masie. Włókno węglowe wykorzystane do konstrukcji poszycia skrzydła i stateczników ma gramaturę odpowiednio 39g/m2 i 27 g/m2 . Jest to jedna z najlżejszych tkanin węglowych na świecie. Użycie tak zaawansowanej technologii i najnowszych materiałów pozwoliło na ogromną redukcję wagi samolotu przez co konstrukcja waży zaledwie 3.2 kg i jest w stanie udźwignąć ponad trzykrotność własnej masy.
Członkowie zespołu podczas zawodów wiele razy spotykali się z uznaniem a nawet i niedowierzaniem zarówno konkurentów jak i sędziów gdy podawali jaki lekki jest wykonany model.
Aby zapewnić odpowiednią celność zrzutu podczas lotów model został wyposażony w zaawansowaną elektronikę. Na pokładzie modelu znajduje się moduł autopilota co oznacza, że zadaniem pilota jest jedynie wystartować i wylądować, całą resztą steruje komputer.
Podczas produkcji modelu testowane były również innowacyjne materiały i technologie. Członkowie mogą się pochwalić opracowaniem technologii przesycania lekkich tkanin i wykonywania elementów kompozytowych przy użyciu innowacyjnej żywicy w proszku ASSET. Przeprowadzili oni udane próby integracji światłowodu w strukturze kompozytu. Włókno optyczne pozwala na pomiar odkształceń i wyznaczenie naprężeń jakie działają na testowany element w czasie lotu.
Efektem 9 miesięcy prac (bo tyle trwało zaprojektowanie i zbudowanie samolotów przeznaczonych na zawody) było zdobycie przez zespół AERO TEAM ILK AGH trzech srebrnych medali. Sędziowie byli pod wrażeniem ogromu pracy włożonej w projekt przez studentów oraz z uznaniem ocenili efekt końcowy, ostatecznie przyznali zespołowi nagrody za:
- drugie miejsce w klasyfikacji ogólnej klasy Advanced
- drugie miejsce za raport techniczny
- drugie miejsce za celność zrzutu
Biorąc pod uwagę, że jest to debiut reprezentantów AGH na tego typu zawodach, gdzie liczy się zarówno pomysł jak i technologia oraz sprawność manualna pilota występ można uznać za wielki sukces, a w przyszłości dzięki zdobytemu doświadczeniu możemy spodziewać się nawet lepszych wyników. Należy jednak pamiętać, że regulamin zawodów jest zmieniany co roku.
- Projekt bolidu Formuły student
Zespół AGH Racing zapoczątkowany został w marcu 2012 roku. Od samego początku tworzyła go grupa entuzjastów motoryzacji. Celem prac zespołu jest coroczny start w najbardziej prestiżowych międzynarodowych zawodach Formuła Student/Formuła SAE. Zawody skupiają uczelnie techniczne z całego świata i co roku organizowane są na wszystkich kontynentach. Każdy uniwersytet może w danych zawodach wystawić tylko jeden bolid. Do wyboru są dwie kategorie auta z napędem spalinowym lub auta z napędem elektrycznym. Podczas zawodów oceniany jest zarówno projekt samochodu jak również kosztorys i biznes plan. Następnie auto przechodzi szczegółową inspekcję techniczną i może zostać dopuszczone do konkurencji sprawnościowych i wyścigów. Testy dynamiczne w formule student obejmują test hamowania, maksymalne przyspieszenie, jazdę po ósemce, jazdę sprawnościową na czas oraz endurance czyli najbardziej widowiskowy 22 kilometrowy wyścig. Podczas wyścigu bolidy pokonują 22 kilometrowy tor i może być przeprowadzona tylko jedna zmiana kierowcy, bez możliwości ingerencji w samochód. Jest to na tyle wymagająca konkurencja, że średnio kończy ją mniej niż połowa startujących zespołów.
AGH Racing ma już na koncie 2 sezony startowe, pierwszy bolid (rys. 6) w 2013 roku brał udział w Międzynarodowych zawodach FS UK na torze Silverstone oraz w Gyor na Węgrzech.

Rys. 6. Pierwszy bolid wykonany przez AGH Racing Team
Drugi bolid (rys.7) wybudowany w sezonie 2014 brał udział w międzynarodowych zawodach FS Czech Republic oraz FS Spain na torze F1 Circuit de Barcelona-Catalunya gdzie zajął 20 miejsce w klasyfikacji generalnej na 60 zgłoszonych do zawodów drużyn. Aktualnie trwają przygotowania do trzeciego sezonu startowego 2015 z trzecim autem wyścigowym, podczas którego zespół będzie rywalizował na torach F1 Riccardo Paletti Circuit (FS Italy), F1 Circuit de Barcelnona-Catalunya (FS Spain) oraz na torze Gyôr-Gönyü Harbour (FS Hungary).

Rys. 7. Drugi bolid zbudowany przez AGH Racing Team
Podczas zawodów można nie tylko podglądnąć warsztat najlepszych zespołów z całego świata, ale także wymienić się doświadczeniem oraz poznać niezwykłe osobistości Formuły 1. Od 2006 roku patronem zawodów jest Ross Brawn, znany konstruktor bolidów F1.
Aktualnie zbudowany trzeci bolid wyścigowy AGH to jak do tej pory najnowocześniejsza konstrukcja powstała w garażu AGH Racing Team. Praktycznie każdy podzespół auta został zaprojektowany od nowa z uwzględnieniem redukcji masy, optymalizacji wytrzymałości i polepszenia osiągów samochodu. Główne modyfikacje związane są ze zwiększeniem ilości elementów wykonanych z materiałów kompozytowych, gdzie stosowane są włókna węglowe, kevlar oraz ultralekkie materiały wypełniające na bazie syntetycznej. Całkowitej modyfikacji uległ pakiet aerodynamiczny, w którym zastosowane kształty skrzydła przedniego i tylnego pozwoliły na zwiększenie docisku aerodynamicznego auta przy jednoczesnej redukcji masy. Zaprojektowane od nowa zawieszenie typu PULL-ROD zbudowane zostało w oparciu o amortyzatory Cane Creek umiejscowione przy podwoziu dzięki czemu środek ciężkości pojazdu został maksymalnie obniżony, a parametry jezdne uległy zdecydowanej poprawie. Szereg innowacyjnych rozwiązań zastosowano także w układzie jezdnym, gdzie modyfikacji uległa skrzynia biegów, sprzęgło i układ automatycznej zmiany biegów. Aktualnie kierowca jest w czasie rzeczywistym informowany o wszystkich parametrach jezdnych samochodu, a elektronika automatycznie steruje procesem ruszania (nie ma pedału sprzęgła). Pełna telemetria pozwala na monitorowanie i rejestrowanie kluczowych parametrów jazdy. Bolid wybudowane zgodnie z regulaminem FSAE jest mniejsze niż poprzednie modele i lżejsze o ponad 50kg w porównaniu do pojazdu z sezonu 2014.
Udział w zawodach daje studentom ogromne doświadczenie praktyczne oraz umożliwia zdobycie doświadczenia we współzawodnictwie z najlepszymi na świecie. Jest to niezmiernie ważne gdyż umożliwia pozbycia się kompleksów i przygotowanie do globalnego konkurowania w przyszłej pracy zawodowej. Przygotowanie projektu i start w zawodach uczy przede wszystkim pracy w zespole oraz uczy rozwiązywania złożonych zagadnień technicznych. Jest to nie tylko czas rywalizacji zawodowej, ale także spełnienia własnych pasji. Projekt dynamicznie propaguje ideę Formuły Student nie tylko na AGH, ale także w kraju. W Formule Student startuje kilka polskich zespołów, które z roku na rok zajmują co raz wyższe lokaty, choć konkurowanie z najlepszymi zespołami z Niemiec czy USA nie jest łatwe. Wsparcie uczelni oraz pomoc sponsorów jest kluczowym aspektem funkcjonowania zespołu, dzięki temu zespół może stale podnosić swoje kompetencje, zwiększać stopień zaawansowania technologii użytych do budowy samochodów wyścigowych ale także mieć bezpośredni kontakt z najnowocześniejszymi technologiami rozwijanymi w przemyśle. Projekt AGH Racing jest jednym z kluczowych ogniw łączących nie tylko teorię z praktyką, ale także system nauczania ze środowiskiem przemysłowym. To całkiem nowe podejście do kształcenia, który znajduje coraz szersze uznanie zarówno w środowisku naukowym jak również gospodarczym.

Rys. 8. Zespół AGH Racing Team na zawodach w Hiszpanii.
Obecnie AGH Racing jest największym interdyscyplinarnym projektem studenckim na AGH (rys.8).
- Projekt satelity klasy CANSAT na zawody CanSat competition 2015
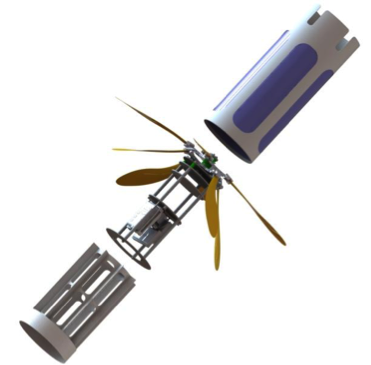
Celem projektu jest wprowadzenie grupy studentów w technologie kosmiczne oraz skonstruowanie i wykonanie prototypu satelity klasy CANSAT (rys.9), którego misją jest symulacja podróży sondy przez atmosferę planety z jednoczesnym pobieraniem kompleksowych danych podczas opadania. Cały system Cansat złożony jest z dwóch głównych części: Modułu Naukowego (Science Vehicle) i kontenera ochronnego (Container) zabezpieczającego urządzenie podczas lotu, wyrzutu z rakiety oraz wczesnej fazy opadania.
Rys. 9 Konstrukcja satelity klasy CANSAT wykonana przez zespół studentów AGH.
Rozmiar oraz masa całkowita Cansata były najważniejszymi ograniczeniami przy projektowaniu. Wymiary modułu ładunkowego w rakiecie są ściśle określone, w związku z czym zbudowaliśmy nasze urządzenie z uwzględnieniem tych restrykcji wraz z odpowiednimi marginesami. System wyrzucany jest z rakiety na dużej wysokości, a następnie wykorzystuje spadochron celem ustabilizowania pierwszego etapu lotu zapewnienia odpowiednich warunków do uwolnienia Modułu Naukowego – sondy planetarnej.
Po opuszczeniu kontenera, Moduł Naukowy uruchamia współosiowe wirniki z przeciwbieżnymi łopatami, by uzyskać prędkość opadania mniejszą niż 10m/s (rys. 10).

Rys. 10. Wirniki sondy zapewniające jej stabilizację podczas powrotu na ziemie.

Rys. 11. Członkowie zespołu podczas przetwarzania sygnałów odbieranych od sondy.
Sonda stabilizuje lot i prędkość powyżej regulaminowego pułapu 300 metrów. Podczas lotu kamera umieszczona w Module Naukowym nagrywa cały jego przebieg, aż do momentu zetknięcia się z ziemią (rys.3). Kamera jest stabilizowana w czasie rzeczywistym za pomocą silnika bezszczotkowego sterowanego przez regulator z czujnikami inercyjnymi. Sonda wyposażona jest w wiele precyzyjnych czujników zbierających podczas opadania obszerne dane, takie jak: ciśnieniowy pomiar wysokości, temperaturę sondy, temperaturę otoczenia, stan oprogramowania lotu, parametry stabilizacji, poziom zasilania oraz kąt opadania. Dane są transmitowane z częstotliwością 1 Hz do stacji naziemnej za pomocą modułów radiowych XBee. Dodatkowo wbudowana pamięć Flash pozwala na zapis wszystkich pomiarów z częstotliwością większą niż telemetria. Sonda Planetarna, zawiera ponadto podsystem mieszczący surowe kurze jajko, zadaniem jest skonstruowanie system który zabezpiecza je przed uszkodzeniem podczas trwania misji. W ramach projektu stworzono specjalny moduł bezpieczeństwa z niezwykle wytrzymałą obudową wykonaną z kompozytu oraz wnętrza z pianki poliuretanowej o dużym współczynniku tłumienia drgań. Przeprowadziliśmy wiele udanych testów zrzutowych potwierdzając jego niezawodność. Udział w zawodach rozpoczął się w lutym 2015, kiedy to jury składające się ze specjalistów NASA dokonało oceny konstrukcji. Zespół otrzymał za swoją konstrukcję 97,6 % możliwych do osiągnięcia punktów i gratulacje od sędziów oraz upragnione “See you in Texas!”. W marcu odbył się drugi etap kwalifikacji, czyli Krytyczny Przegląd Projektu, zespół zdobył 99.2% punktów tym samym miejsce wśród 10 najlepszych zespołów na świecie. Zawody CanSAT 2015 odbywały się w Burkett (Texas USA) w dniach 12-14 czerwca 2015. W trakcie eliminacji do zawodów zostały zakwalifikowane ostatecznie 42 drużyny które rywalizowały w ramach ustalonego harmonogramu zadań do wykonania przez lądownik. Podstawowe zadania to: opadanie na spadochronie po uwolnieniu z rakiety, separacja lądownika od zasobnika związanego ze spadochronem, przesył danych w telemetrii, zabezpieczenie sekcji lądownika z ładunkiem narażonym na uszkodzenie, opadanie z zadaną prędkością oraz nagrywanie obrazu z zadaną orientacją. Za każde zadanie komisja sędziowska przyznawała odpowiednią punktację. Nasza drużyna AGH Space Systems wykonał wszystkie zadania uzyskując łącznie ocenę 98,56% i był bezkonkurencyjny i pokonał wszystkie zespoły z całego świata. To wielkie osiągnięcie ze względu na to, że był to pierwszy w AGH start w zawodach w dziedzinie technologii kosmicznych. AGH Space Systems działa w ramach Wydziału Inżynierii Mechanicznej i Robotyki i składa się z 7 studentów, są to: Adam Kurzak – lider zespołu, Bartosz Postulka – konstrukcja mechaniczna, Bartosz Moczała – elektronika, Jakub Rachucki – stacja naziemna, Robert Betka – system kontroli lotu, Weronika Mrozińska – system bezpieczeństwa jajka, Tomasz Fuchs – mechanika i organizacja. Opiekunem zespołu jest dr hab. inż. Tomasz Buratowski. Rysunek 12 przedstawia członków zespołu wraz z organizatorem zawodów w Texasie.

Rys. 12. Zwycięski zespół AGH Space Systems po zawodach w Texasie w towarzystwie organizatora.
- Podsumowanie
Projektu edukacyjne prowadzone w Katedrze Robotyki i Mechatroniki AGH są zaplanowane i prowadzone jako projekty interdyscyplinarne w których najważniejszymi elementami są nauczenie umiejętności integracji różnych dyscyplin w jednym projekcie, nauczenie efektywnego rozwiązywania problemów inżynierskich w celu skrócenia cyklu realizacji projektu. Przyjęto również zasadę, w wszystkich projektach, że są one realizowane z uwzględnieniem całego cyklu życia produktu oraz są realizowane w warunkach konkurencji. W czasie studiów jest to konkurencja w ramach międzynarodowych zawodów i konkursów studenckich co wykształci w studentach umiejętność pracy i realizacji projektów warunkach konkurencji. Bardzo istotnym elementem realizowanego procesu edukacji inżynierów jest nauczenie ich umiejętności zarządzania projektem, zarządzania własnym czasem pracy, samodzielności w podejmowaniu decyzji projektowych, jak również pracy zespołowej. Z drugiej strony taka realizacja edukacji wyrabia w studentach entuzjazm zawodowy, kreatywność i przedsiębiorczość. Nie należy jednak zapominać o kosztach tego typu kształcenia, są one stosunkowo wyższe od klasycznych kursów. Jednak jak pokazały uzyskane wyniki, tego typu podejście do edukacji jest bardzo skuteczne, a nasi studenci należą do czołówki światowej.
- Podziękowanie
Dziękuję opiekunom poszczególnych zespołów, w szczególności dr hab. inż. Tomaszowi Buratowskiemu, dr inż. Danielowi Prusakowi, dr. inż. Alberto Gallina oraz wszystkim studentom zaangażowanym w realizację projektu za dostarczenie materiałów do niniejszego tekstu oraz za wysiłek w realizację projektów, które osiągnęły duży międzynarodowy sukces.