

Laboratorium Systemów Wizyjnych
1. Możliwości badawcze/pomiarowe
Opracowane przez pracowników laboratorium metody oraz algorytmy pomiarowe oparte o techniki wizyjne pozwalają na przeprowadzenie następujących badań w różnych obszarach techniki i medycyny:
- Rekonstrukcja trójwymiarowej struktury i ruchu obiektów.
- Komputerowe przetwarzanie obrazów.
- Wizyjne pomiary oraz wizyjna kontrola jakości obiektów.
- Identyfikacja oraz lokalizacja obiektów.
- Badanie powtarzalności oraz trajektorii ruchu robotów.
- Wizyjne sterowanie robotami mobilnymi i podwodnymi.
- Detekcja pęknięć i uszkodzeń powierzchni podwodnych zbiorników żelbetonowych.
- Aktywne systemy wizyjne w sterowaniu robotami.
- Szybkie prototypowanie algorytmów wizyjnych oraz układów sterowania wizyjnego.
- Przetwarzanie i analiza obrazów medycznych.
- Wizyjne sterowanie robotami medycznymi.
- Przetwarzanie i analiza obrazów mikroskopowych tkanek.
- Wizyjne badania własności mechanicznych materiałów biologicznych.
- Antropometria i analiza biomechaniki ruchu ciała człowieka wspomagana systemami wizyjnymi.
- Wizyjny pomiar przemieszczeń i ugięć konstrukcji.
- Wizyjny pomiar drgań konstrukcji.
- Wizyjna detekcja uszkodzeń konstrukcji.
- Analiza modalna oparta o sygnały wizyjne.
- Analiza dynamiki konstrukcji w oparciu o sygnały wizyjne z wykorzystaniem operacyjnej analizy modalnej.
- Rejestracja oraz wizualizacja postaci drgań ( w trybie ruchu zwolnionego).
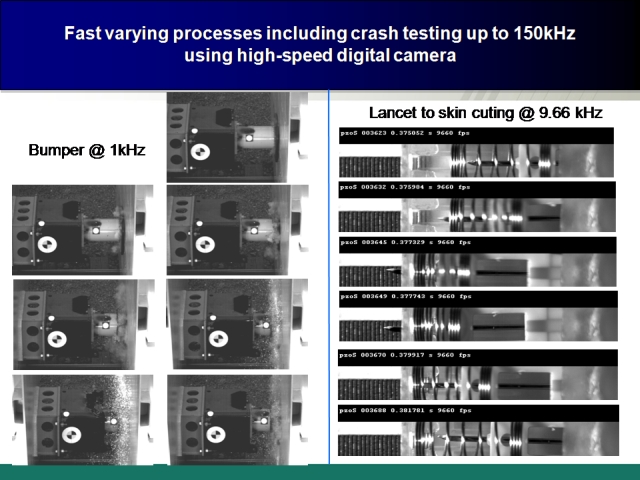
- Rejestracja oraz analiza procesów szybkozmiennych (w tym testy niszczące obiektów technicznych).
- Bezkontaktowy pomiar pola przemieszczeń konstrukcji.
- Pomiary dwuwymiarowych i trójwymiarowych deformacji konstrukcji lub ich fragmentów.
- Dwuwymiarowe oraz trójwymiarowe pomiary przebiegów drgań w wybranych punktach konstrukcji.
- Wizualizacja postaci drgań konstrukcji z wykorzystaniem cyfrowej kamery pomiarowej.
- Pomiar przebiegów drgań w zakresie od 0 do 300 Hz oraz wizualizacji drgań w zakresie 0 – 20 kHz.
2. Aparatura pomiarowa i wyposażenie laboratorium
- Dwie szybkie kamery cyfrowe Phantom v9.1 (rozdzielczość 2 megapiksle , szybkość rejestracji do 150 000 klatek/s) wraz z zestawem obiektywów i osprzętem fotograficznym.
- Szybka kamera cyfrowa XS-3 (rozdzielczość 1 megapiksel , częstotliwość rejestracji ponad 57 000 klatek/s) wraz z zestawem obiektywów i osprzętem fotograficznym.
- Kamery przemysłowe oraz internetowe wykorzystywane jako komponenty systemów wizyjnych sprzężonych z robotami (przemysłowymi oraz mobilnymi).
- Aparaty fotograficzne Canon 5DMII wraz z zestawem obiektywów i osprzętem fotograficznym.
- Skaner ATOS I 2M do pomiarów 3D, trójwymiarowej rekonstrukcji obiektów wraz z oprogramowaniem do inżynierii odwrotnej oraz kontroli jakości.
- Oprogramowanie do analizy ruchu na płaszczyźnie i w przestrzeni trójwymiarowej TEMA AUTOMOTIVE ( przykładowe aplikacje: przemysł motoryzacyjny, testy zderzeniowe, biomechanika).
- System do analizy ruchu w przestrzeni trójwymiarowej składający się ze stereowizyjnego układu szybkich kamer wraz z oprogramowaniem Tema Automotive (maksymalna częstotliwość rejestracji 150 000 klatek/sekundę).
- System do analizy ruchu w przestrzeni 6D składający się z jednej szybkiej kamery wraz z oprogramowaniem Tema Automotive (maksymalna częstotliwość rejestracji 150 000 klatek/sekundę).
- Wiz2DDeflection – program do pomiaru deformacji konstrukcji oparty o cyfrową korelację obrazu.
- System do monitorowania stanu konstrukcji składający się z kilku aparatów fotograficznych Canon EOS oraz oprogramowania Wiz2DDeflection.
- Robot Adept Viper s650 z system wizyjnym AdeptSight 2.0.
- Platforma programowo-narzędziowa Matlab/Simulink/dSPACE (do symulacji i prototypowania algorytmów i układów sterowania wizyjnego w czasie rzeczywistym na sprzęcie dSPACE).
 |
 |