

ZAGADNIENIA BADAWCZE
Mobilna wiertnica rdzeniowa do pracy w ekstremalnych warunkach
Na przestrzeni ostatnich lat, przy eksploracji obiektów astronomicznych, w tym innych planet, dużego znaczenia nabiera możliwość analizy próbek skał ze strefy podziemnej. Koniecznym jest zastosowanie urządzeń wiertniczych pobierających próbki.
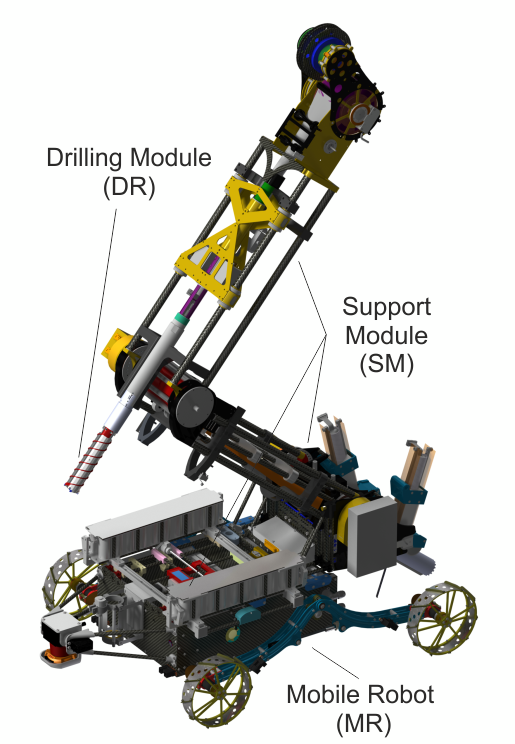
Mobilna wiertnica rdzeniowa do pracy w ekstremalnych warunkach to urządzenie zaprojektowane we współpracy trzech ośrodków badawczych: Centrum Badań Kosmicznych PAN, Katedry Robotyki i Mechatroniki, WIMIR, AGH oraz Katedry Wiertnictwa i Geoinżynierii, WWNIG, AGH. System ten przeznaczony jest do wykonywania zadań w środowisku kosmicznym, zwłaszcza, gdy duże znaczenie ma masa systemu, małe zużycie energii oraz możliwość autonomicznej pracy.
System został podzielony na trzy podsystemy, pełniące określoną funkcjonalność podczas misji:
MR (Mobile Robot) – robot mobilny – projekt Katedra Robotyki i Mechatroniki, WIMIR, AGH
SM (Support Module) – moduł podpierający – projekt Centrum Badań Kosmiczych PAN
DR (Drilling Module) – moduł wiercący – projekt Katedra Wiertnictwa i Geoinżynierii, WWNIG, AGH
Parametry systemu:
- głębokość wiercenia do 2 m
- średnica otworu 30 mm
- średnica rdzenia 25 mm
- masa systemu 25-29 kg
- możliwość pobrania 40 próbek
- autonomiczna praca
- zasilanie akumulatorowe
Podsystem MR odpowiedzialny jest za transport modułu wiertniczego do miejsca pracy oraz poziomowanie mechanizmu podpierającego SM. W module MR przewożony jest również komputer pokładowy oraz układy zasilające.
Podsystem DR odpowiedzialny jest za wykonywanie odwiertu oraz przechowywanie rdzenia na czas transportu do zasobnika.
Podsystem SM odpowiedzialny jest za kotwiczenie wiertnicy mobilnej, ustawianie pozycji mechanizmu wiercącego, oraz przechowywanie próbek na czas transportu do bazy.
Mobilny robot gąsienicowy do inspekcji rurociągów
Inspekcja przewodów rurowych jest bardzo istotnym aspektem utrzymania instalacji w przemyśle. Tysiące kilometrów rurociągów transportują różnorodne ciecze, takie jak woda, ścieki, ropa naftowa i inne. Ze względu na trudny dostęp do rurociągów, wymagających inspekcji stosuje się obecnie różnego typu roboty inspekcyjne.
Efektem zastosowania mechatronicznego procesu projektowego, jest prototyp robota gąsienicowego przeznaczonego do inspekcji rurociągów. Proces składał się z projektowania równoległego: mechaniki w oprogramowania CAD; symulacji komputerowych; układów elektronicznych oraz oprogramowania.
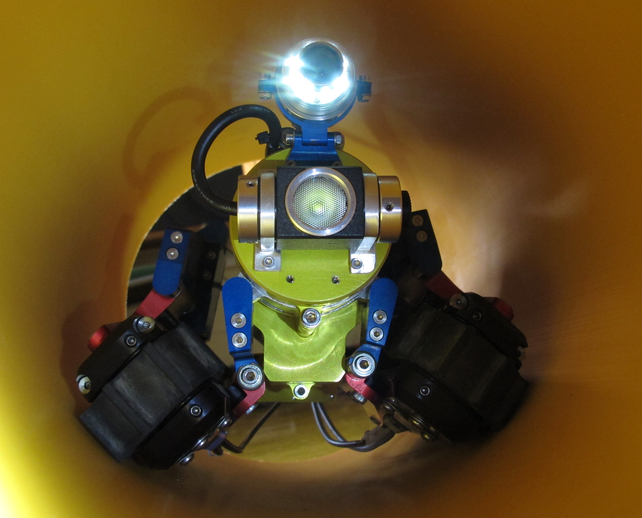
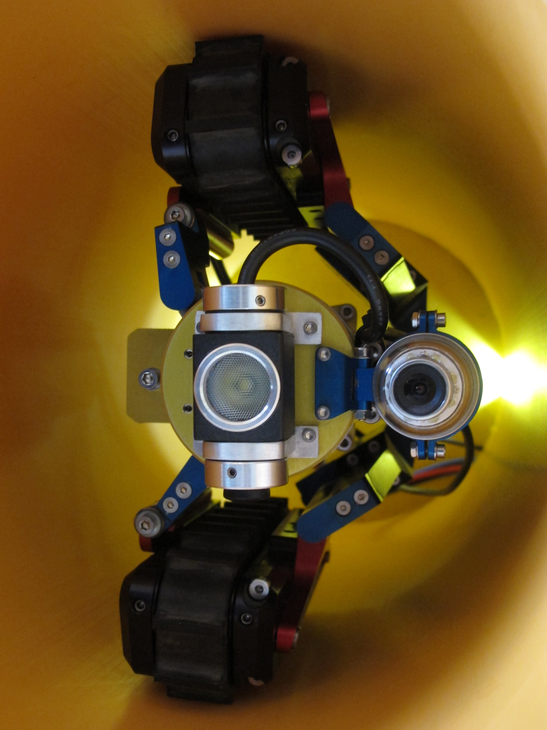
Zaawansowana technologicznie konstrukcja robota pozwala na poruszanie się w rurociągach o przekroju kołowym i średnicy od ø210 mm, przekroju prostokątnym, powierzchniach płaskich, oraz pionowych odcinkach rur o wymiarach w zakresie ø230- ø270. Adaptacyjność konstrukcji uzyskano dzięki innowacyjnemu systemowi pozycjonowania gąsienic, z zastosowaniem sześciu niezależnych serwomechanizmów, pozwalających uzyskać różne konfiguracje robota. Do przeprowadzania inspekcji robot wyposażony jest w kamerę CCTV z dodatkowym oświetleniem, umożliwiającą ocenę wizualną stanu technicznego rurociągu w czasie rzeczywistym. Całość konstrukcji została zabezpieczona przed wpływem czynników zewnętrznych, przede wszystkim cieczy, co umożliwia pracę urządzenia w środowisku wodnym. Planowane testy prototypu pozwolą na doświadczalne zoptymalizowanie algorytmów adaptacji do przestrzeni roboczej.
 Robot do inspekcji rurociągów podczas ruchu w rurze poziomej |
 Robot do inspekcji rurociągów podczas ruchu w rurze pionowej. Docisk gąsienic pozwala na ruch w rurze o dowolnej orientacji . |
Mobilny robot gąsienicowy do inspekcji zbiorników z cieczą
Inspekcja zbiorników z cieczą jest ważnym aspektem eksploatacji sieci wodociągowych, ze względu na konieczność utrzymania w dobrym stanie technicznym ścian i dna zbiorników. Zastosowanie robota pozwala na ograniczenie kosztów, gdyż operacje analizy stanu technicznego mogą być prowadzone podczas eksploatacji, bez konieczności opróżniania zbiorników.
Robot inspekcyjny posiada Sonar Tritech Eclipse 3D przeznaczony do tworzenia modeli trójwymiarowych przestrzeni podwodnych lub zamiennie pompę zanurzeniową, służącą do oczyszczania dna zbiorników z osadu.
Efektem zastosowania mechatronicznego procesu projektowego jest prototyp robota gąsienicowego przeznaczonego do inspekcji zbiorników z cieczą. Proces składał się z projektowania równoległego: mechaniki w oprogramowania CAD; symulacji komputerowych; układów elektronicznych oraz oprogramowania.
Robot może pracować na głębokościach do 30 m pod wodą. Dzięki zastosowaniu płyty montażowej w łatwy sposób możemy zmienić oprzyrządowanie robota i zainstalować pompę zaopatrzoną w zgarniacz lub szczotkę, które pozwalają w łatwy sposób oczyścić dna zbiornika. Robot wykonany jest ze stali nierdzewnej oraz z aluminium, co pozwala na zastosowanie go w zbiornikach z wodą pitną.
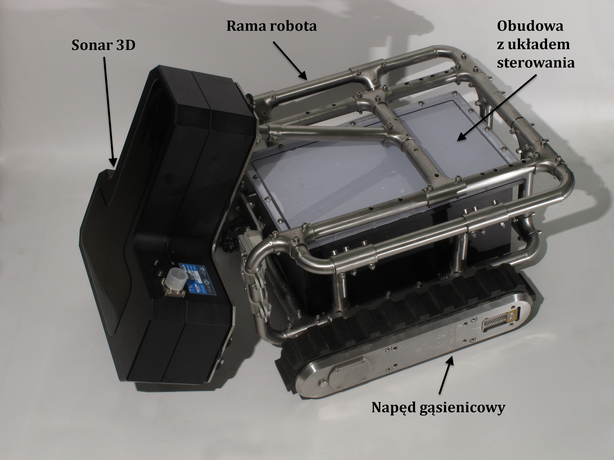 Robot do inspekcji zbiorników z sonarem 3D |
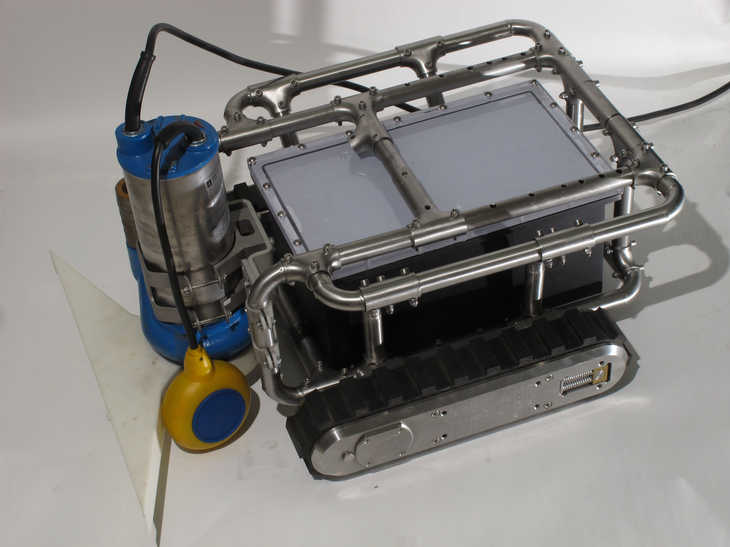 Robot do inspekcji zbiorników z oprzyrządowaniem do oczyszczania dna z osadu – pompą zanurzeniową. |
– Rekonstrukcja trójwymiarowej struktury i ruchu obiektów
– Wizyjne sterowanie robotami mobilnymi
– Wizyjne sterowanie robotami podwodnymi
– Aktywne systemy wizyjne w sterowaniu robotami
– Wizyjne pomiary oraz wizyjna kontrola jakości obiektów
– Identyfikacja oraz lokalizacja obiektów
– Komputerowe przetwarzanie obrazów
– Badanie powtarzalności oraz trajektorii ruchu robotów
– Szybkie prototypowanie algorytmów wizyjnych oraz układów sterowania wizyjnego
– Przetwarzanie i analiza obrazów medycznych
– Wizyjne sterowanie robotami medycznymi
– Przetwarzanie i analiza obrazów mikroskopowych tkanek zwierzęcych
– Wizyjne badania własności mechanicznych materiałów biologicznych
– Antropometria i analiza biomechaniki ruchu ciała człowieka wspomagana systemami wizyjnymi.